Software overview
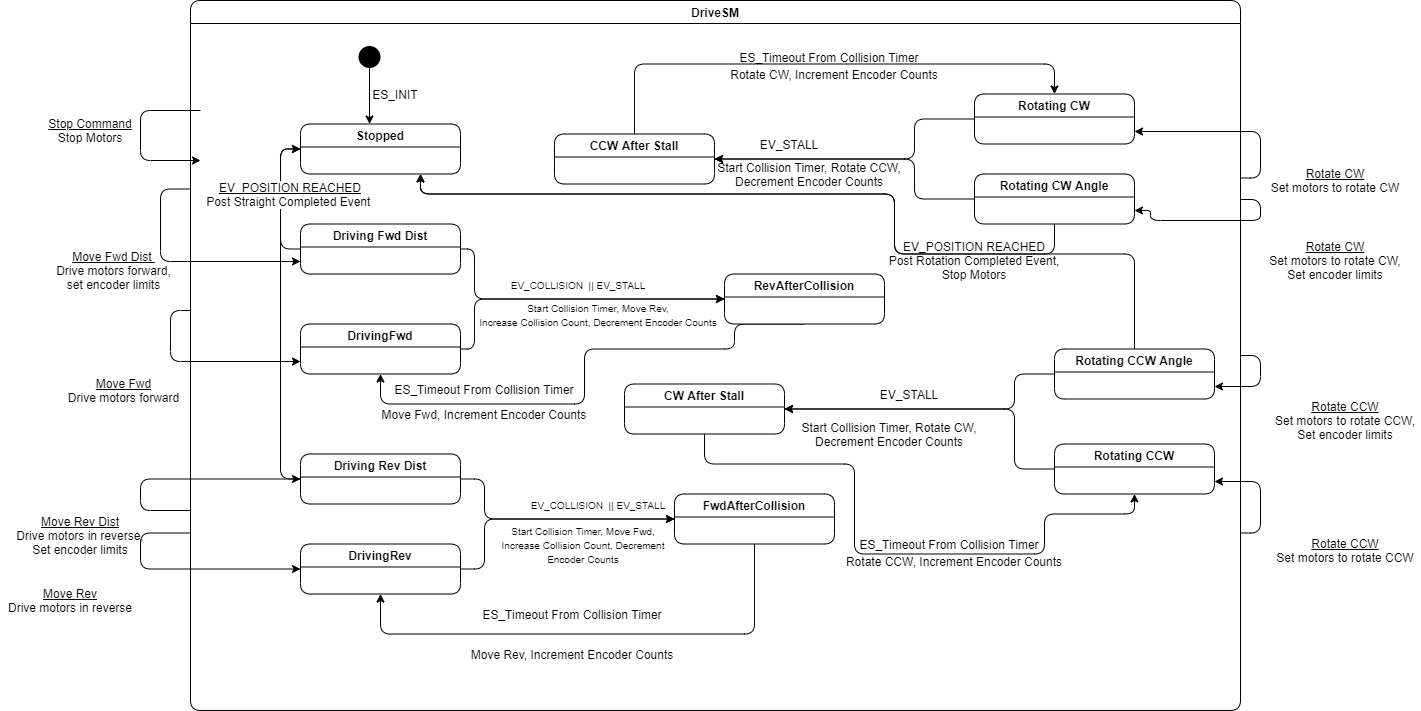
Our software handled ingesting and processing sensor input, determining the status of the game, calculating the current move, and actuating through hardware. Explore the state charts, pseudocode, and complete code listings below for more details! Highlights include a SPUD communications service that maintained a complete understanding of the game state in a set of nested structs, a Planner module that calculated best routes and updated in real-time, and a feedback drive controller that let the robot drive straight and through turns with a millimeter-level precision as well as handle collisions within its own state machine.
State charts and diagrams